El Centro de Desarrollo de Sensores y Sistemas (CD6) de la Universitat Politècnica de Catalunya – BarcelonaTech (UPC) ha desarrollado tecnologías para vehículos autónomos, que mejoran la seguridad en los desplazamientos. Los vehículos autónomos son una realidad a la que nos acercamos despacio, pero de manera inexorable.
En este sentido, para cubrir las necesidades de percepción del entorno a largo alcance, se requiere el desarrollo de un conjunto muy completo de sensores, entre los cuales se incluyen cámaras, LIDAR (Light Detection And Ranging) y radar.

Si bien la solución en cuanto al hardware es conocida (requiere combinar diferentes sensores como cámaras de diferentes tipos, para compensar los diferentes modos de fallo de cada uno), hace falta todavía mucho trabajo para mejorar en cuanto a la percepción que puede ofrecer el software.
La forma en la que se fusionan los datos, o la exactitud con que se perciben peatones o amenazas a largas distancias, son todavía campos de trabajo de gran recorrido hasta llegar a una solución definitiva. Con este proyecto se mejorarán los aspectos de percepción y fusión de los sensores de imagen, radar y nubes de puntos de alta densidad, lo cual permitirá mejorar la percepción de los vehículos en entornos hostiles, como niebla o humo, e incluso arena o smog.
Resultados de las investigaciones
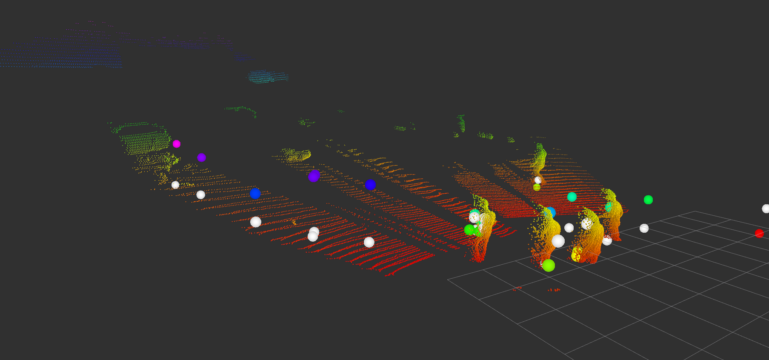
En el marco del proyecto del CIT-UPC, se ha desarrollado una solución software para la detección en medios dispersivos, que integra cámara, LIDAR y radar, a través de la generación de datasets y algoritmos de deep learning. En concreto, se han desarrollado algoritmos de fusión de sensores que permiten integrar el procesamiento de imágenes en tiempo real de diferentes sensores de imagen, datos de radar y LIDAR respectivamente. Este enfoque con múltiples sensores cubre los diferentes modos de quiebra de los sensores y, por tanto, proporciona un entorno de trabajo sólido en todas las condiciones climáticas. El paso siguiente será incorporar diferentes tipos de cámaras (RGB, NIR, SWIR, térmicas) de forma que estén perfectamente fusionadas con los datos LIDAR a todas las distancias.
Este enfoque permite realizar detecciones mucho más seguras en algoritmos de visión por computador basados en inteligencia artificial, eliminando falsas alarmas. Esta tecnología ha sido licenciada y ha dado lugar a una spin-off, quien la ha dado con sublicencia a un TIER1.
En el proyecto ha colaborado también el Intelligent Data Science and Artificial Intelligence Research Center (IDEAI) de la UPC, a través del Grupo de Procesamiento de Imagen de la UPC. Este proyecto ha recibido financiación del programa de investigación e innovación Horizonte 2020 de la Unión Europea bajo el acuerdo de subvención Marie Skłodowska-Curie No 712949 (TECNIOspring PLUS), así como de ACCIÓ, la Agencia para la Competitividad de la Empresa de la Generalitat de Cataluña.